UFLDL: Sparse Coding
Sparse Coding
Sparse Coding 可以看做一种 unsupervised learning 的方法,作用是从数据里学习一组 over-complete 的 basis,使得输入数据 x 可以表示为这些 basis 的线性组合。 根据 UFLDL 的说法,这些 basis 可以反映、捕捉输入数据内在的一些规则与结构:
The advantage of having an over-complete basis is that our basis vectors are better able to capture structures and patterns inherent in the input data.
Over-complete 的作用相当于是增强冗余。假设我们使用 autoencoder 学习到了图像的 2 个 edge feature(想象成是横与竖),那么对于对角线这样的 edge,对应的 coeffifient 需要对这两个 feature 进行插值,一旦有 noise,就很容易造成 coefficient 的变化。 想对地,如果我们学到了,比如 64 个 edge,那么每个 edge 可以看做是互相的插值, 而对应的 coefficient 也比较 smooth:表示任意角度的 edge 我们都可以只需要给临近的几个 edge features 非零系数即可。根据 wiki 的说法,这与人类视网膜的结构类似:
The human primary visual cortex is estimated to be overcomplete by a factor of 500, so that, for example, a 14 x 14 patch of input (a 196-dimensional space) is coded by roughly 100,000 neurons.
Sparsity and Under-determined Linear system
因为跟 “sparse” 有关,我首先从线性代数的角度阐述一下。
假设我们有数据 \(x \in R^n\), 那么每个维度 就是一个 basis。如果我们旋转这组数据,就相当于得到了另外一组 basis。一般来说, 如果数据维度是 n,那么我们就需要 n 个这样的 basis 来表示数据。如果我们把这些 basis 看做一个矩阵 \(A \in R^{n \times n}\),其中每个 column 是一个 basis,\(s \in R^n\) 是数据在这个 basis 下的 coefficient,那么 \(x = As\),就是相当于把数据映射到这个空间后的值。 显然,当 \(A\) 是方阵并且这些 basis 是 linear indeependent时,给定 x 后解 s 是唯一的。
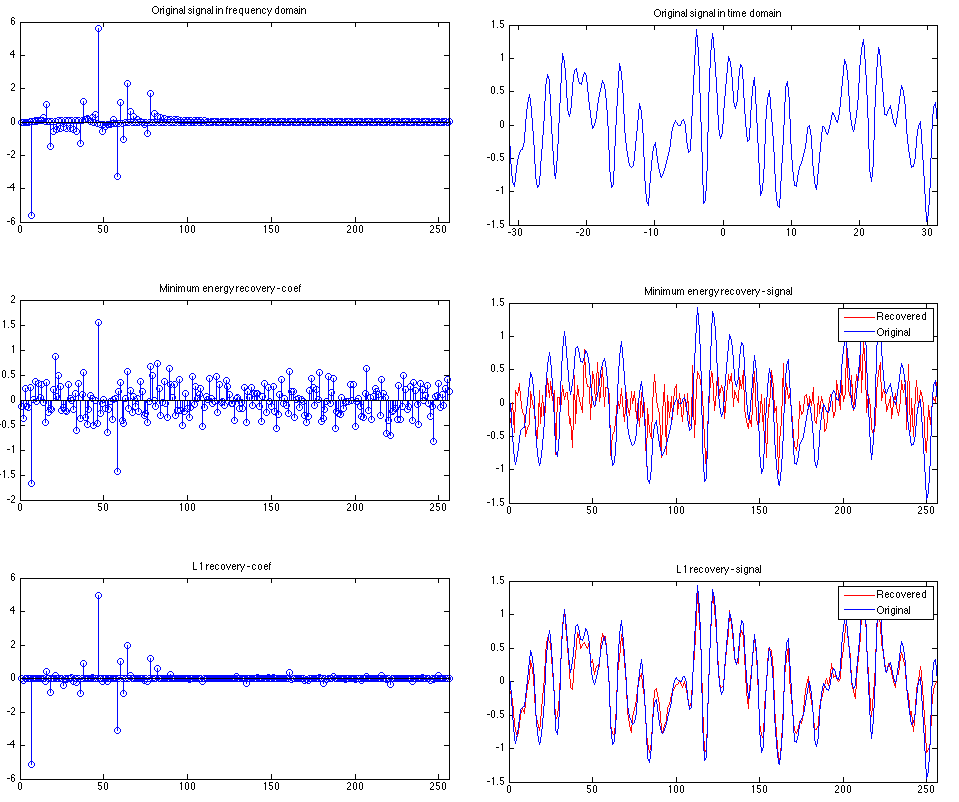
但是当 A 的行数小于列数时,即 \(m < n\),这时的 linear system 是 under-constrained,
那么会有无穷多个解。如下面的 matlab code 所示,我们用 \ (最小二乘法) 以及 pinv (伪逆矩阵)
求解得到的 s 是不同的。
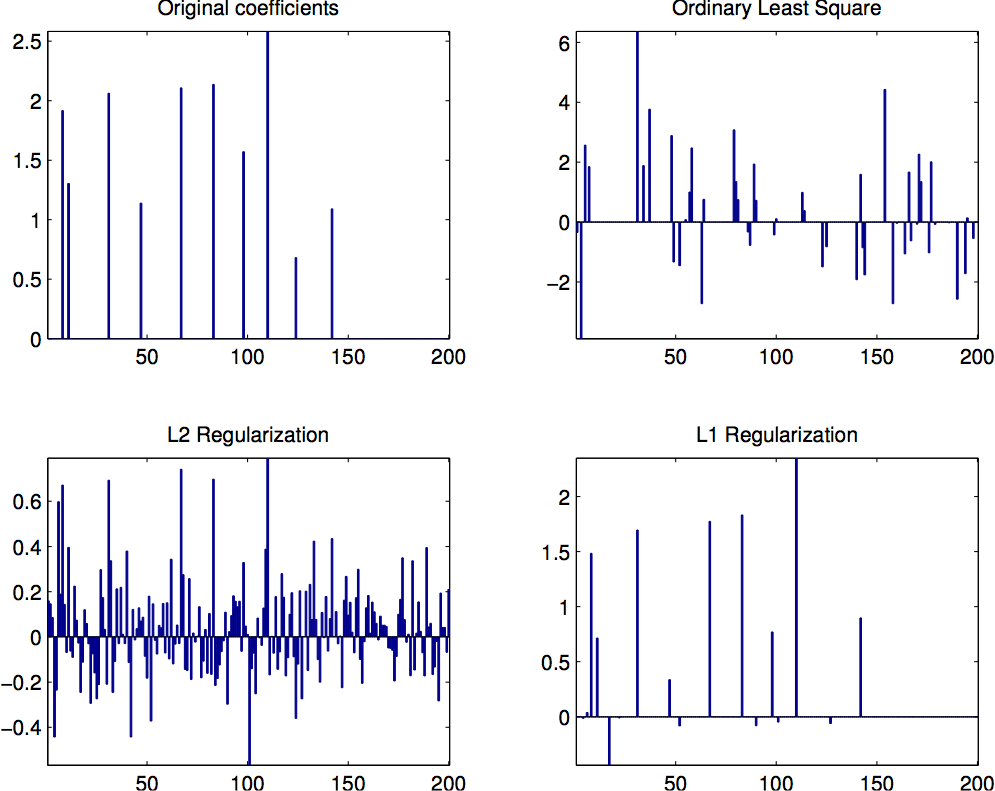
但是如果我们加入了一些 constraint,情况就会有所不同。具体来说,我们希望 coefficient 里面的 non-zero elements 尽可能地说,也就是所谓的『sparsity』 constraint。
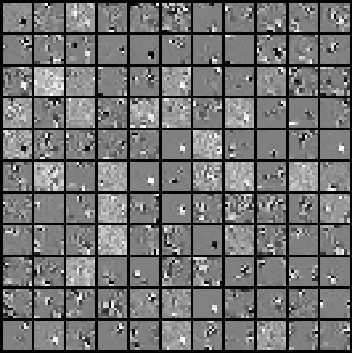
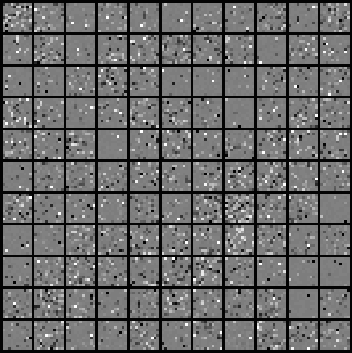
值得注意的是, PCA 也是找 basis 的一种方法, 但是 PCA 只能找到 \(k \le n\) 的 basis, 所以无法解决我们的问题(我们需要 \(k > n\))。 对于 Sparse Coding Exercise 里用到的 20000 个 8x8 的 image patch,用 PCA 找到的 basis 看起来是这样的:
Sparse Coding: Objective Function
我们再考虑这个问题:假设 \(x\) 是输入数据,我们希望寻找到 k 个 basis \(\phi_i\) 使得 \(x\) 能被表示为他们的线性组合,其中 \(a_i\) 为对应的 coefficient,i.e.,
\[x = \sum_{i=1}^k a_i \phi_i\]使用经典的 least square method,对于 m 个数据 \(D = \{x^{(1)}, \ldots, x^{(m)}\}\), 我们可以写下如下的 Objective function 进行优化:
\[\min_{a_i^{(j)}, \phi_i} \sum_{j=1}^m \left\lVert x^{(j)} - \sum_{i=1}^k a_i^{(j)} \phi_i \right\rVert^2\]注意到三点:
- 不同于经典的 linear system, 这个 Objective function 我们有两样东西要优化: 系数 \(a_i^{(j)}\) 与 basis \(\phi_i\) (稍后解释[如何处理][Sparse Coding: Optimization])。
- 这个 Objective function 的解可以有无穷多个(因为是 under-determined)。
- 对于一组解,我们可以 scale up \(a_i^{(j)}\) 同时 scale down \(\phi_i\) 从而得到新的解, 但事实上这是冗余的。
如上面所讨论的,我们希望系数 \(a_i^{(j)}\) 是 sparse 的,也就是说,对于每个数据 \(x^{(j)}\), 我们希望尽可能多的 \(a_i^{(j)}\) 为 0。如果用 \(S(a)\) 来表示一个 penalize sparsity 的 function,当 \(\vert a\vert > 0\) 时,\(S(a)\) 返回一个很大的 cost。理论上,我们可以使用所谓的 \(L_0\) norm 作为这个 cost function,也就是当 \(a=0\) 时 \(S(a) = 0\), 否则 \(S(a) = 1\). 可是这个 function 既不是 smooth 也不不可微。所以我们一般使用 \(L_1\) penalty \(S(a) = \vert a\vert _1\) 或者 log penalty \(S(a) = \log (1+a^2_i)\). 为了解决第三个问题,我们可以限制 \(\phi_i\) 的 scale。把所有以上考虑进去,我们可以得到新的 Objective function:
\[\begin{split} \min_{a_i^{(j)}, \phi_i} & \sum_{j=1}^m \left\lVert x^{(j)} - \sum_{i=1}^k a_i^{(j)} \phi_i \right\rVert^2 + \lambda \sum_{i=1}^k S(a_i^{(j)}) \\\\ s.t. & \left\lVert \phi_i \right\rVert^2 \le C, \forall i=1, \ldots, k \end{split}\]其中第一项可以看为 reconstruction cost, 第二项看为 sparsity penalty, \(\lambda\) 是 scaling factor,\(C\) 是一个常数。
Sparse Coding: Autoencoder Interpretation
以上的优化问题,其实可以看作一个 sparse autoencoder 的变种:input layer 对应于 sparse feature s, hidden layer 则是已知数据 x,他们之间的 connection 是 \(W^{(1)} = A\),A 的每个 column 对应于一个 basis。我们希望学习到 A 与 s, 使得 x 能被 \(As\) 重构,因此 \(\vert As - x\vert _2^2\) 可以看做 reconstruction cost。 从线性代数的角度来说,A 可以看做一个 linear transform,s 是数据在 feature space 的 representation,而 x 是原始数据的 representation。As 的效果是把数据从 feature space 映射到 data space。 同时,我们希望 feature 是 sparse 的,因此我们有 sparsity penalty term \(\lambda \vert s\vert _1\)。这个 Objective 写为:
\[\begin{split} \min_{A, s} & \left\lVert As - x \right\rVert^2_2 + \lambda \left\lVert s \right\rVert_1 \\\\ s.t. & \ A^T_j A_j \le 1 \ \forall j \end{split}\]其中 \(A^T_j A_j \le 1\) 是为了限制 basis 的 norm 大小而设置的,如上面所讨论。 注意到加了这个 constraint 后上面是一个 constrained programming problem, 要使用类似 gradient descent 的算法解决此类 问题,我们可以把 constraint 加到 Objective 里,成为一个所谓的 『weight decay』 term。因此我们定义 Objective function \(J(A,s)\) 为:
\[J(A, s) = \left\lVert As - x \right\rVert^2_2 + \lambda \left\lVert s \right\rVert_1 + \gamma \left\lVert A \right\rVert^2_2\]注意到几点:
- \(\min J(A, s)\) 此时是一个 unconstrained programming,并且主要有三个 term 组成, 分别是 reconstruction cost, sparsity penalty, weight decay term。
- \(L_1\) norm 在 0 点时无法求导。一般的方法是用 approximation 的方法来 “smooth out”。 具体地, 我们使用 \(\sqrt{s^2 + \varepsilon}\) 来代替 \(\vert s\vert _1\)。其中 \(\varepsilon\) 是一个 smoothing parameter, 当 \(\varepsilon\) 比 \(s\) 大时, \(x+\varepsilon\) 会被 \(\varepsilon\) 所 dominate, 所以整个 sqrt term 会约等于常数 \(\sqrt{\varepsilon}\)。 换句话来说,当 \(s\) 足够小(符合 sparsity constraint),这个 approximation 的产生的最小 penalty 为 \(\varepsilon\);否则, 这个 approximation 相当于 penalize non-sparsity。 因此 \(J(A, s)\) 可以改写为:
其中 \(\sqrt{s^2+\varepsilon}\) 是 \(\sum_k \sqrt{s_k^2+\varepsilon}\) 的简写。
值得一提的是,从推导的过程中,我们可以看到,从最简单的 reconstruction cost 开始, 我们逐步地加入更多的 cost/penalty terms 来处理 constraints,包括 sparsity 以及 weight decay (regularization)。这其实在 convex optimization 里也是很常用的技巧: primal-dual。 对于原始的 constrained problem(primal),我们会定义一个 dual problem, 并且把 constraints 加到原来的 Objective function 里使得问题变成 unconstrained。这个 technique 叫做 lagrangian relaxation;加上去的这些 terms 对应的 coefficients 称为 lagrangian multipliers。Dual problem 里,原来要优化的变量我们看做常量, 而 lagrangian multipliers 是要优化的变量。 可以证明这个 dual problem 是 convex 的。在我们这个问题里, 我们并没有直接优化 dual problem,相反地,我们把 lagrangian multipliers 定义为常量, 可以理解为一种 heuristic,因为这些 multipliers 也是可调的参数。
此外,对于不可导的函数, 采用 approximation 的方法把他们替代为可导的函数也是很常用的技巧。 另外一种常见的 approximation 是把 \(max(x)\) 替代为 log-sum-exp (x),因为 exp 会把 max(x) 放大,然后加起来取 log 相当于这个 max(x) 会 dominate 整个 function。
Sparse Coding: Topographic Features
个人觉得 UFLDL 上关于这一块讲得不是特别清楚,所以这里会把它尽量解释清楚。
并且加入了大量的例子以及 visualization。
根据上面所述,我们会学习到 basis A 以及 feature s。但是根据观察,人类大脑皮层检测 edge
方向的神经元往往是有序的。具体来说,相邻的神经元检查的 edge 朝向接近,
比如检查 40, 45, 50 度的神经元相邻的。所以,我们也希望学习到的 feature 是
topographically ordered。直观来说,这样的效果是,如果某个 feature i 的值非零,
那么相临的 i-1, i+1 等,也应该是相似的非零值。比如说 s 大概长成
[0.0 0.0 0.12 0.34 0.67 0.95 0.73 0.45 0.32 0.11 0.0 0.0] 这样子。
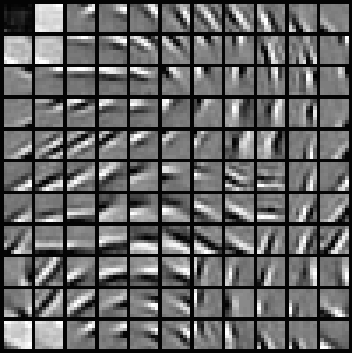
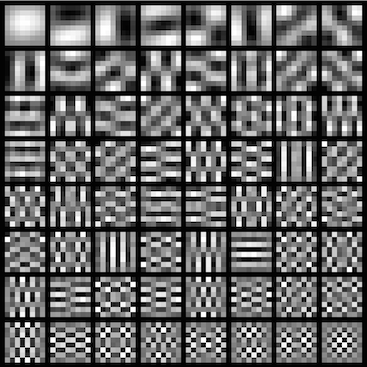
我们原来的 sparsity penalty 只要求 feature 有 sparse 特性。 对于每个 feature \(s_i\),我们只有一个对应的 penalty term \(\sqrt{s_i^2 + \varepsilon}\)。 反映到 2D 图像上, 如果我们希望 impose topographic ordering,我们可以 “group” 相邻的 features,使得某个 feature activate 时,周围区域的 features 也该 similarly activate。所以如果把这个 feature vector plot 出来,看起来某个地方是有一个明显的块状。这意味着,比如 40 - 50 度的 neurons 会被 activate。如面两图所示,左右分别是 Topographic / Non-topographic Features 与 Basis。可以看到,topographic features 的图像里有很多明显的小方块,而 nontopographic 看起来只是一堆无规律的 noise。对于 Basis images 则更明显了, non-topographic basis 看起来正是使用 sparse autoencoder 学习到的 edge features。 而 topographic basis 则是很漂亮地排了序。
 |
 |
|
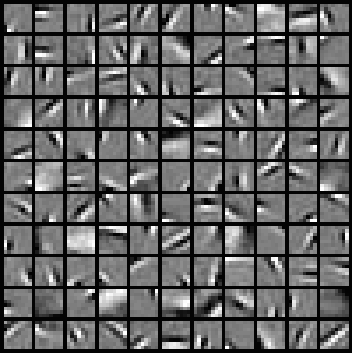 |
好了,有了 intuition,我们具体怎么做呢?假设我们把 feature vector 重新排成一个 square matrix,我们希望把 3x3 regions group 起来,那么我们只需要在 sparse penalty 里加入类似这样的项:
\[\sqrt{\sum_{i=1}^3 \sum_{j=1}^3 s_{i,j}^2 + \varepsilon}\]其中 \(s_{i,j}\) 代表第 \(i\) 行 \(j\) 列的 feature。上面表示的是把 (1,1) - (3,3) 这个区域的 features group 起来。对于所有的 3x3 regions,我们都该加入类似的项, 可以想象成对这个 feature matrix 用一个 sliding window 生成所有项。
这里我们可能会有疑问:我们是对 feature 进行 grouping,为什么出来的 basis 就被『排序』了呢?直观来说,如果我们把每个 basis 看做一个 neuron,并且把它们排列成一个 matrix, 我们希望相邻的 neurons 能检测『接近』的 edges,所以每个小区域里的 neuron 对应的 edge filter 总是相似的(如上面左下图所示)。所以如果 features 的 value 总是成块出现的,对应的 neurons 也该被 “block activated”。具体到矩阵运算上面,参考下面的 1D 例子:
A * s = x B * t = x
1 0 0 0 1 1 1 0 0 0 1 1
0 1 0 0 1 1 0 0 1 0 0 1
0 0 1 0 0 0 0 0 0 1 1 0
0 0 0 1 0 0 0 1 0 0 0 0
其中 A 与 B 是 Basis matrix,每个 column 对应与一个 basis。注意它们是代表的 是完全相同的 basis space,只是 column 排列顺序不同。 并且,A*s 与 B*t 都生成相同的 x, 但 s 里的两个 non-zero 是相邻的,而 t 则非相邻。
至此,我们已经理解了如何进行 topographic sorting,因此,我们可以重写 Objective function 为:
\[J(A, s) = \left\lVert As - x \right\rVert^2_2 + \lambda \sum_{\text{all groups g}} \sqrt{\left( \sum_{\forall s \in g} s^2 \right) + \varepsilon} + \gamma \left\lVert A \right\rVert^2_2\]我们可以只用一个 “grouping matrix” V 来方便程序实现,其中 V 的每行代表一个 group; \(V_{r,c}=1\) 代表 group \(r\) 包含 feature \(c\)。换句话说, V 是一个『选择』矩阵。 举例来说,假设我们把一个 feature vector \(s\in R^9\) 看成一个 3x3 matrix, 把 matrix 里的每个 2x2 region看做一个 group,那么就会有四个 group:1245, 2356, 4578, 5689. 下面的代码说明了如何使用 V 来实现 grouping (请把 [1 … 9] 看做 \(s_1^2, \ldots, s_9^2\)):
1 2 3 4 5 6 7 8 9
V s^2
1 1 0 1 1 0 0 0 0 [1 2 3 4 5 6 7 8 9]^T => 1 + 2 + 4 + 5
0 1 1 0 1 1 0 0 0 2 + 3 + 5 + 6
0 0 0 1 1 0 1 1 0 4 + 5 + 7 + 8
0 0 0 0 1 1 0 1 1 5 + 6 + 8 + 9
因此,我们把 Objective function 改写为:
\[J(A, s) = \left\lVert As - x \right\rVert^2_2 + \lambda \sum \sqrt{V s^2 + \varepsilon} + \gamma \left\lVert A \right\rVert^2_2\]其中 \(\sum \sqrt{V s^2 + \varepsilon} = \sum_r \sum_c D_{r, c}\), \(D = \sqrt{V s^2 + \varepsilon}\)
注意我们还应该实现 “wrapping around”,细节请参考 UFLDL。
Sparse Coding: Vectorization and Summary
以上的推导都是只假设了一个 sample x 以及一个 feature vector s。高效的实现时需要完成 vectorization。 如果我们用 \(S\) 以及 \(X\) 代表 feature 以及 data matrix, \(S^{(i)}\), \(X^{(i)}\) 对应于第 i 个 column,那么最终的 Objective 为:
\[J(A, S) = \frac{1}{m}\sum_{i=1}^m \left\lVert AS^{(i)} - X^{(i)} \right\rVert^2_2 + \lambda \sum \sqrt{V S^2 + \varepsilon} + \gamma \left\lVert A \right\rVert^2_2\]注意这里的 \(S^2\) 是指 \(S \circ S\)1。
在 matlab 里,我们可以 vectorize 上面一些步骤。比如 reconstruction cost 可以写成
sum(sum((A*S - X).^2)) / m。 其中里层的 sum 相当于算出每个 sample 的
reconstruction cost,即 \(\left\lVert As^{(i)} - x^{(i)} \right\rVert^2_2\),
而外层的 sum 则是把所有的 cost 加起来。具体的 code 请参考我的 solution.
Sparse Coding: Gradients
上面提到,我们有两个变量需要优化:A, s。注意到,\(J(A, s)\) 里的 sparsity 以及 weight decay term 都是 convex 的。问题出在 reconstruction cost 上:它不是 convex 的。 根据 UFLDL ,以及 A. Ng nips06 的 paper [1],观察到 fix A (或 s), 则对于 s (或 A),\(\left\lVert As - x \right\rVert^2_2\) 都是 convex 的。 因此,我们可以迭代解决对于 A 与 s 的优化问题。直观来说,这有点像 [EM] 算法: 每次固定一个变量时,我们都能得到另外一个变量的新的、更小的 upperbound。如此迭代下去, 每个变量都能保证至少不比上一次迭代要大,直到收敛。
对于 \(\min_A J(A ; s)\) (注意符号,读作 find A that minimizes J(A, s) given s), 我们可以 drop 掉 sparse penalty (因为与 A 无关),\(J(A; S)\) 只是一个关于 A 的 quadratic optimization,所以我们可以很容易得到一个 closed-form formula,只需要 使关于 A 的 gradient 为零,也就是:
\[\nabla_A J = 0 \Leftrightarrow 2 (As - x) s^T + 2 \gamma A = 0 \Leftrightarrow A = xs^T (s s^T + \gamma I)^{-1}\]其中关于 \(\left\lVert As - x \right\rVert^2_2\) 的 gradient 计算请参考 The matrix cookbook 公式 (83)。注意上式针对的是 s, x 为 vector 的情况。我们现在来考虑 \(J(A; S)\)。注意到我们可以用 Frobenius norm 的形式来表示 \(J(A, S)\):
\[J(A, S) = \frac{1}{m} \left\lVert AS - X \right\rVert^2_F + \lambda \sum \sqrt{V S^2 + \varepsilon} + \gamma \left\lVert A \right\rVert^2_2\]其中 \(\left\lVert A \right\rVert^2_F = \sqrt{\sum_i \sum_j \left \vert a_{ij}\right \vert ^2}\),所以我们有:
\[\nabla_A J = 0 \Leftrightarrow 2 (AS - X) S^T / m + 2 \gamma A = 0 \Leftrightarrow A = XS^T (S S^T + \gamma m I)^{-1}\]可以看到,与 vector 形式是很相似的。
对于给定 A 求 S 的情况,很遗憾我们无法找到一个 closed-form formula,因此我们尝试使用 gradient descent。首先我们要找 S 的 gradient,难点在 sparsity penalty term \(\lambda \sum \sqrt{V S^2 + \varepsilon}\) 里,注意这里有点滥用数学符号: \(\sqrt{\cdot}\) 与 \((\cdot)^2\) 在这里都是指 element-wise 的运算。 这里似乎使用最原始的方法展开整个表达式来推导 gradient 比较直观,或者把式子当做 复合函数然后使用 chain rule 来进行求导, 我暂时没有想到很简洁的矩阵表达方法。这里给出最后的 gradient 为:
\[\nabla_S J = V^T (V S^2 + \varepsilon)^{(-1/2)} \circ S\]Sparse Coding: Optimization
如上面所提到的,因为整个问题是 non-convex 的,我们必须迭代求解 \(A\) 与 \(S\) 进行优化。 然而正如 EM 等算法,我们必须先解决先有鸡还是先有蛋的问题:假设我们先优化 \(A\),则必须 先有一个 \(S\) 的初始值。根据 UFLDL, 随机产生的 \(S\) 很可能使得优化收敛速度过慢。 一个好的初始化 \(S\) 的方法如下:
- \[S \gets A^T X\]
- 对于每个 \(s = S^{(i)}\),使用对应的 basis \(A^{(i)}\) 进行 normalize。也就是:
此外,一个实际的考虑是如果我们每轮迭代都使用所有的数据进行优化,也就是所谓的 batch 方法,那么优化时间会过长。想对地,如果我们每次使用一个随机的子集,比如 2000 out of 10000, 来进行优化,往往优化速度可以被大大加快。
Experimental Results and Observations
以下是我在完成 Sparse Coding Exercise 时的一些观察与体会:
- 大量参考了这里。 证实了里面提到的两点:
- UFLDL Sparse Coding Exercise 里的 \(s s^T\) 应该是 \(s^2\) 或者 \(diag(s s^T)\),因为 s 是 column vector,而我们要生成 \(s \circ s\) (element-wise square, dot product)。
- 关于使用 backpropagation 算法来推导 gradient,UFLDL 上的推导似乎不是很严谨。在 Example 2 里推导 A 时,A 是作为第一层的 weight 存在,即 \(W^{(1)}\)。 如果严格按照 BP 算法,那么对于 \(A=\nabla W^{(1)}\) 应该只需要计算到第二层的误差 \(\delta\),使得 \(\nabla W^{(1)} = \delta^{(2)} (a^{(1)})^T\)。而教程里是直接算到了第一层的误差 \(\delta^{(1)}\). 而在 Example 3 里推导 s 时,s 却是作为输入存在的(第一层的 neurons),同样也需要算到第一层的误差,同时,经典 BP 里的 gradient 算的总是针对 connections 上的 weight,而这里 s 是 input layer。 一个 unified 的办法也许是加多一个第 0 层,输入是 \(I\) (Identify function),并且把 \(W^{(0)}\) 设置为需要计算 gradient 的矩阵(也就是说, Example 2 里是 A, Example 3 里是 s),连接到第 1 层上。那么这时算我们要算的 gradient 就统一为 \(\nabla W^{(0)}\) 了。
References
- [1]H. Lee, A. Battle, R. Raina, and A. Y. Ng, “Efficient sparse coding algorithms,” in Advances in neural information processing systems, 2007, pp. 801–808.

Comments